


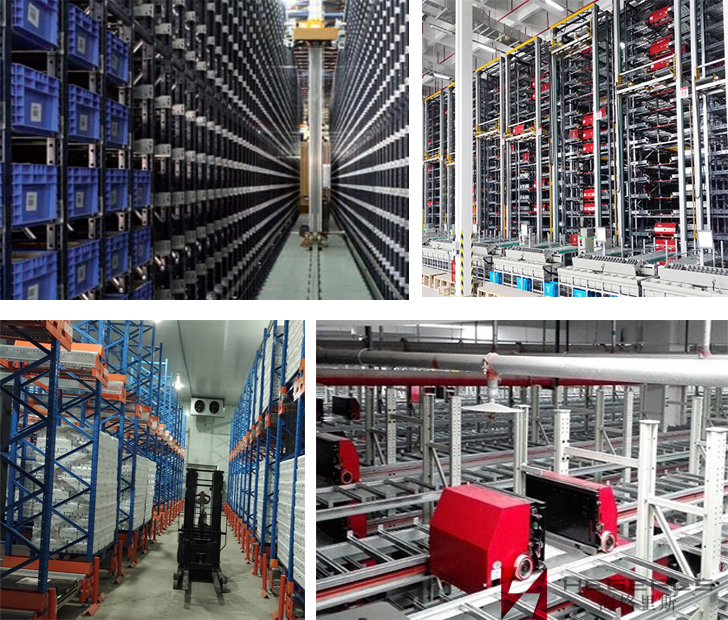
Door de aanhoudende populariteit van internet heeft de e-commerce zich de afgelopen jaren snel ontwikkeld. De bestelde goederen van klanten vertonen de kenmerken van vele variëteiten, weinig batches en een korte levertijd, waardoor de opslagdichtheid van de schappen in het logistieke distributiecentrum van de leverancier voortdurend verbetert. De frequentie waarmee materialen het magazijn binnenkomen en verlaten, neemt toe. Het aantal pick-ups van kleine onderdelen neemt met de dag toe. Steeds meer logistieke distributiecentra maken gebruik van het op shuttleauto's gebaseerde systeem voor het picken van goederen naar mensen.
HEGERLS (Hebei Walker Metal Products Co., Ltd.)
Vastklemmende telescopische vorken worden veel gebruikt in automatische opslagapparatuur, zoals meerlaagse shuttle-auto's in stereomagazijnen, AGV-, RGV- en miniload-bakken. Het maximale gewicht van de materiaaldoos die door HEGERLS wordt vastgehouden, kan 50 kg bedragen. De klembreedte van de vorkarm kan willekeurig worden aangepast binnen het bereik van 200 ~ 600 mm. De maximale plukweg bedraagt 840 mm. De maximale werksnelheid van de telescopische vork is 1,5 m/s en de versnelling is 1,2 m/s². Het bedrijfsgeluid wordt binnen 75 dB geregeld, wat kan voldoen aan de eisen van de meeste rekken met enkele en dubbele verlenging. HEGERLS kan het meerlaagse stereoscopische magazijn van de grijptelescopische vorkkast ook aanpassen aan de specifieke eisen van klanten, zoals de grijpbreedte, plukslag en andere parameters.
De onderdelen in de Hiygris HEGERLS gegrepen telescopische vorkdoos meerlaags shuttle autoradiomagazijn De telescopische vork is een telescopisch mechanisme dat wordt gebruikt in het stereomagazijn en het logistieke automatische opslagsysteem voor materiaalopslag of -overdracht. Het heeft een flexibele tweeweg automatische expansiefunctie en een nauwkeurige limietfunctie! Hij kan rechtstreeks op de stapelaar worden gemonteerd, op een vast hefmechanisme of op een mobiel hefplatform. De stapelaar loopt door de rijbaan tussen de planken om automatisch toegang te krijgen tot artikelen of deze over te dragen! Het kan worden verbonden met het productielijnsysteem en het bedrijfsbeheersysteem. Het maakt gebruik van computer- en barcodetechnologie (encoder) om informatie intelligent beheer en bediening te realiseren!

Over HEGERLS Vastklemmende telescoopvork
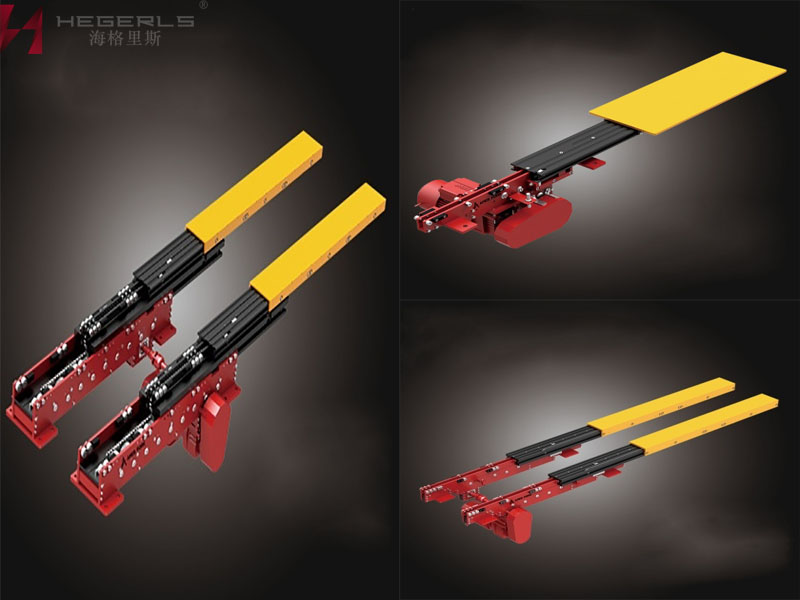
HEGERLS telescopische grijpvork is een uniek soort vork in de serie telescopische vorken van stapelaars, namelijk een tweeweg automatische telescopische grijpvork, ook wel vasthoudgrijpvork of vasthoudgrijpvork, een vorkvork of een vorkvork genoemd . Het is een vork die speciaal wordt gebruikt voor het overzetten van kleine bakken. Het kan direct worden gemonteerd op een AGV met meerdere verdiepingen of andere werkplatforms, met de uitzetting van de vorkarm en de koppeling van de hendel (haak). Voltooi de toegangs- of overdrachtsactie!
De HEGERLS-grijpvork is grotendeels gemaakt van een aluminiumlegering en heeft een klein formaat, een laag gewicht, een hoge loopsnelheid en een soepele uitzetting. Tegelijkertijd hanteert het ook het principe van synchronisatie met meerdere motoren, waarbij wordt gerealiseerd dat hetzelfde telescopische vorkmechanisme kan worden gebruikt voor het overbrengen of openen van dozen met verschillende specificaties. Het verbetert niet alleen effectief de opslagefficiëntie, maar verbetert ook aanzienlijk de ruimtebenutting van de opslag, vooral voor hoogbouw-intensieve intelligente magazijnen!
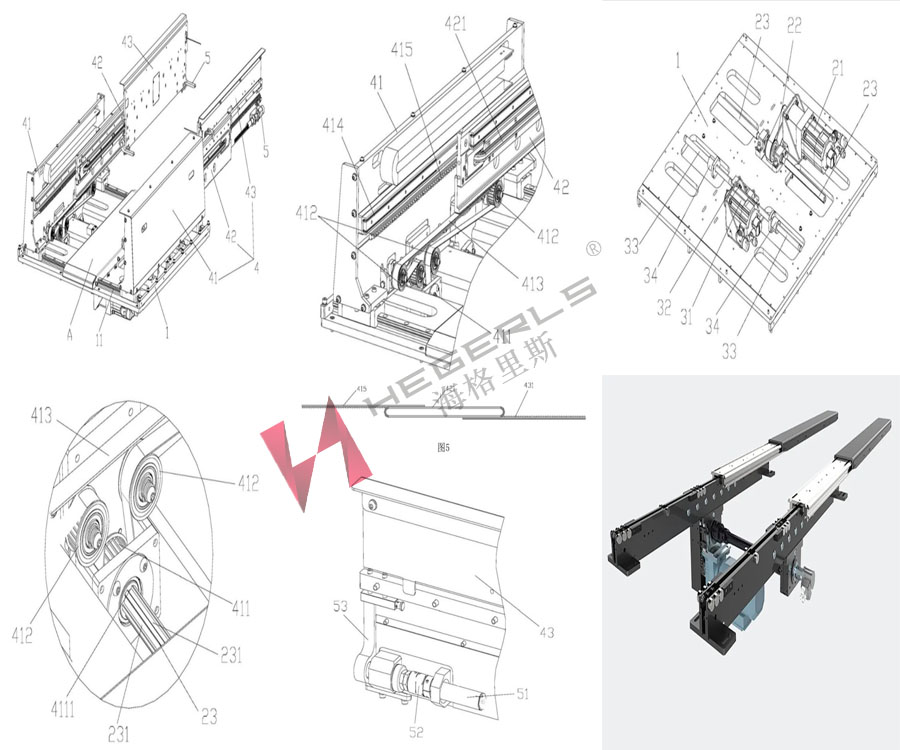
HEGERLS clip-on telescopische vorkstructuur
De structuur van de HEGERLS-grijpvork kan worden onderverdeeld in een diepe opslaglocatie en een ondiepe opslaglocatie. Een diepe opslaglocatie is een opslaglocatie met twee materiaalboxen, en een ondiepe opslaglocatie is een opslaglocatie met één materiaalbox. Dat wil zeggen dat een diepe opslaglocatie twee materiaaldozen tegelijk kan klemmen, terwijl een ondiepe opslaglocatie slechts één materiaaldoos tegelijk kan klemmen. Het verschil tussen de HEGERLS-grijpvork en de gewone duplex-telescopische vork is dat de vingertrekkende vork nog steeds bestaat uit drie vorklichamen, namelijk het binnenste vorklichaam, het middelste vorklichaam en het buitenste vorklichaam, behalve dat het voorvorklichaam heeft nog een trekstang (haak), die past bij de geleiderail (glijrail), rolbeugel, synchroon wiel, synchrone riem, vloeiende staaf, schakelstang (haak), krikas, wielstang, aandrijfmotor (servo) Schakelstangmotor Het detectie-instrument en andere componenten vormen een compleet telescopisch mechanisme, dat samenwerkt met de telescopische vorkarm en de koppeling van de hendel (haak) om de toegangs- of overdrachtsactie te voltooien!
Werkingsprincipe van HEGERLS clip-on telescoopvork
De vorkarm van de HEGERLS-grijpvork staat zijdelings en is zijdelings verbonden door een geleiderail. Door bediening kan de geleiderail heen en weer schuiven om de afstand tussen de twee vorkarmen van de vork aan te passen, om zo het gemeenschappelijke gebruik van een vork voor materiaaldozen met meerdere specificaties te bereiken! Bij het oppakken van materialen strekt de vork zich uit naar de materiaalopslagpositie, de vasthoudhaak (hendel) gaat automatisch omlaag en blokkeert het eindvlak van de kartonnen of plastic doos, en vervolgens trekt de vork zich terug, waardoor de kartonnen of plastic doos naar het midden wordt gesleept. de vork, en beweegt dan achteruit naar buiten volgens de vereisten van de graad, de haak (hendel) wordt teruggetrokken en de vork trekt zich weer terug om de taak van het oppakken of overbrengen te voltooien! Hoewel het principe van de grijpvork hetzelfde is als dat van de gewone telescopische vork, zijn de transmissiedelen, drijfstangen en andere componenten van de vingervork sterk verschillend. Het wordt gebruikt om te beschrijven dat het kettingwiel, de ketting, het tandwiel, het rek, enz. allemaal worden vervangen door synchrone wielen, synchrone riemen, enz., terwijl de schuifarm geleiderails gebruikt en de materialen van het vorklichaam allemaal worden vervangen door metalen platen. of materialen van aluminiumlegering, dus het gewicht van de grijpvork bedraagt slechts ongeveer 80 kg.
Bovendien moet worden opgemerkt dat tijdens het ontwerp van de telescoopvork van het grijpertype de grootte van de dichte opslagplanken, de verticale positie van de planken met dozen, het spoorniveau en de grootte van de dozen moeten worden gecombineerd om de algemene parameters van de verlengingsvorken (beweging van de verlengingsvork, afstand van de dozen, vorkbreedte, interne vorkbreedte, vorkhoogte, enz.), om te voldoen aan de behoeften van containers in de schappen. De klemvork kan de producten die in dozen of plastic dozen zijn verpakt alleen effectief overbrengen of bereiken, en kan geen onregelmatige materialen overbrengen. Bovendien mogen het volume en het gewicht van de overgedragen materiaaldoos niet te groot zijn en mag het laadgewicht niet groter zijn dan 100 kg! De hoogte van de klemvork wordt doorgaans afgestemd op de hoogte van de bak!
Over HEGERLS Clip-on Shuttle
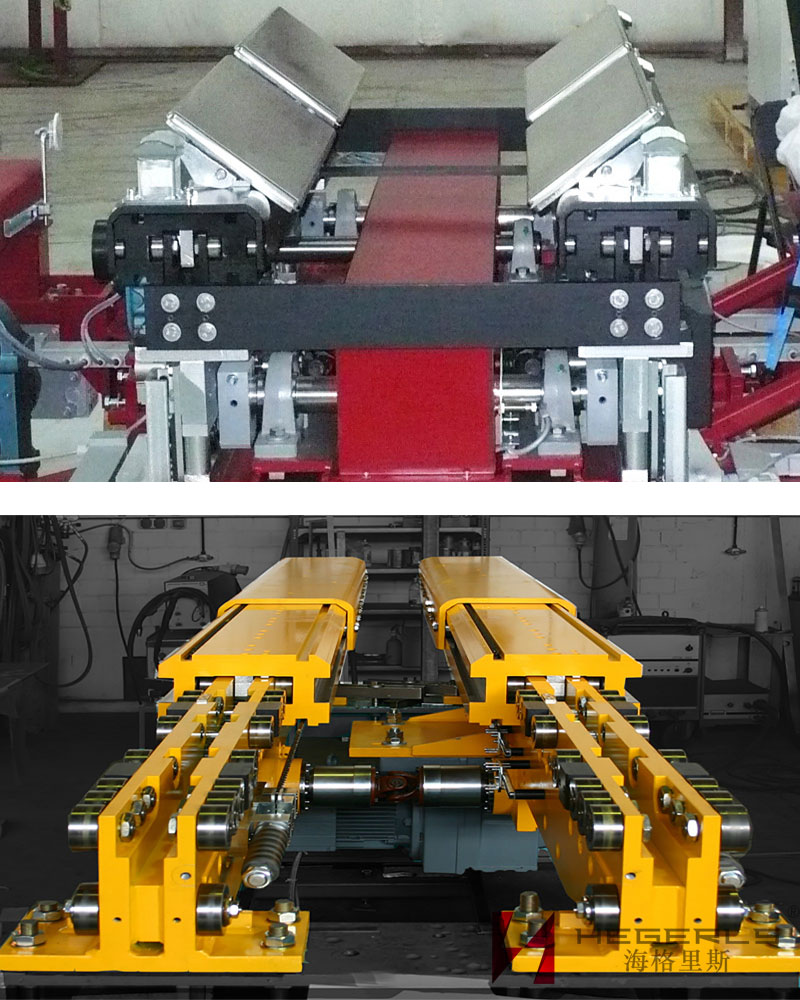
De structuur van de HEGERLS clip-on shuttle bestaat uit een shuttleframe, shuttlechassis, rijmechanisme, secundair vorkverlengingsmechanisme, collector, lagerplaat en lagerplatform. De structuur is als volgt:
Elk shuttleframe is gewoonlijk een gesloten holte die bestaat uit de hoofdlichaambeugels aan beide zijden, de schaal en de binnenste naafbeugel, en is respectievelijk aan beide uiteinden van het shuttlechassis aangebracht; De schaal is voorzien van een bovendeksel dat middels een omslagdeurscharnier kan worden geopend en gesloten; Boven de naafbeugel is een paneeldraadrek aangebracht; Het rijmechanisme omvat een aandrijfwiel, een passief wiel, een borstelloze gelijkstroommotor, een verloopstuk en een verbindingsas; Beide zijden van het shuttleframe aan het ene uiteinde van het shuttlechassis zijn voorzien van aandrijfwielen die zijn verbonden door verbindingsassen, en beide zijden van het shuttleframe aan het andere uiteinde van het shuttlechassis zijn voorzien van passieve wielen die zijn verbonden door verbindingsassen; De borstelloze DC-motor werkt samen met het verloopstuk om het aandrijfwiel aan te drijven en het passieve wiel aan te drijven; De verbindingsas is voorzien van een magnetische encoder, waardoor de start- en stopposities van de shuttle op het rechte spoor worden verkregen; Een secundair vorkverlengingsmechanisme is symmetrisch aangebracht aan de binnenzijde van het frame van de shuttlewagen; Het pendelchassis tussen de secundaire vorkverlengingsmechanismen is voorzien van een lagerplatform voor het plaatsen van de bagagemand; De gesloten holte van het frame van de shuttlewagen is respectievelijk voorzien van een lagerplaat, waarop achtereenvolgens een aandrijfplaat, een hoofdbedieningsplaat van het rijmechanisme en een hoofdbedieningsplaat van het vorkverlengingsmechanisme zijn aangebracht; De aandrijfplaat drijft het loopmechanisme aan om de shuttle op het rechte spoor te laten rijden. Het hoofdbesturingsbord van het rijmechanisme regelt de loopparameters en start-stopposities van de shuttle, en het hoofdbesturingsbord van het vorkverlengingsmechanisme bestuurt het secundaire vorkverlengingsmechanisme om de mand te grijpen en op de plank te plaatsen; Tussen de pendelwagen en de rechte baan is een verzamelinrichting geplaatst, die is verbonden met de geëlektrificeerde draad die in de rechte baan is aangebracht en die wordt gebruikt om de pendelwagen van stroom te voorzien. Het structurele kenmerk van de opklikbare intelligente shuttlewagen voor opslag ligt ook in het feit dat er groeven zijn aangebracht op de posities waar het aandrijfwiel en het passieve wiel respectievelijk contact maken met de verbindingsas, en dat een elastische borgring in de groef is geplaatst om de axiale as te vormen. positionering van het aandrijfwiel en het passieve wiel. Aan de zijkant van het shuttlechassis zijn respectievelijk dubbele geleidewielen geplaatst, onder het aandrijfwiel en het passieve wiel, en tussen de rechte baan en het shuttlechassis. De dubbele geleidewielen vormen de linker- en rechtergrens wanneer het aandrijfwiel en het passieve wiel op het rechte spoor lopen. Het secundaire vorkverlengingsmechanisme omvat: de duwplaat van de vorkverlenging van het eerste niveau, de vorkverlengingsplaat van het tweede niveau, het synchrone katrolmechanisme van het tweede niveau, het aandrijfmechanisme van de vorkverlenging van het tweede niveau, de aandrijfmotor van de vorkverlenging, een ander verloopstuk en de aandrijfas ; De buitenzijde van de naafbeugel van het frame van de pendelwagen is voorzien van een eerste fase vorkverlengingsduwplaat; In het midden van de vorkduwplaat van de eerste trap is een U-vormige goot aangebracht, en in de U-vormige goot zijn verschillende U-vormige gootkatrollen op gelijke afstanden aangebracht; Buiten de U-vormige goot is een secundaire vorkplaat aangebracht; De secundaire vorkplaat is via bouten en moeren verbonden met verschillende U-vormige groefkatrollen; De boveneinden van de vorkverlengplaat van de tweede trap zijn respectievelijk voorzien van een schakelvork, een planetaire gelijkstroomreductiemotor en een foto-elektrische sensor van buiten naar binnen; De foto-elektrische sensor wordt gebruikt om het positiesignaal van de vork te verkrijgen en dit naar de hoofdbesturingskaart van het vorkverlengmechanisme te sturen, dat de DC planetaire reductiemotor bestuurt om de vork horizontaal of verticaal te laten bewegen; Een secundair synchroon katrolmechanisme is respectievelijk aangebracht op de primaire vorkduwplaat en direct onder en boven de U-vormige goot; Het secundaire synchrone katrolmechanisme is verbonden met de synchrone riemaandrukplaat op de secundaire vorkverlengplaat; De aandrijfmotor voor de vorkverlenging en een ander verloopstuk drijven het aandrijfmechanisme van de secundaire vorkverlenging aan om te bewegen, en drijven het aandrijfmechanisme van de secundaire vorkverlenging aan de andere kant aan om door de aandrijfas te bewegen, zodat de primaire duwplaat van de vorkverlenging beweegt en de secundaire aandrijft. synchroon katrolmechanisme om te bewegen, waardoor de secundaire vorkverlengplaat in beweging wordt gebracht. Het tweetraps transmissiemechanisme voor vorkverlenging omvat een magnetische encoder, een synchrone riemschijf I, een synchrone riem I, een spanwielapparaat en een tandheugel; Een distributieriemschijf 1 en een distributieriem 1 zijn aangebracht onder de vorkduwplaat van de eerste fase; De ene kant van de synchrone riemschijf I is verbonden met de transmissie-as en de andere kant is via de spiebaan verbonden met de uitgaande as van het andere verloopstuk. Spanwielinrichtingen worden respectievelijk aan beide zijden van het andere verloopstuk geplaatst voor extra fixatie van de synchrone riemschijf I en de synchrone riem I; Tussen de vorkduwplaat van de eerste fase en de synchrone riem is een rek aangebracht; De aandrijfmotor voor de vorkverlenging en een ander verloopstuk drijven de synchrone riemschijf I en de synchrone riem I aan om te roteren, en drijven de synchrone riemschijf II en de synchrone riem II aan de andere kant aan om door de transmissie-as te draaien. Tegelijkertijd drijven de rekken aan beide zijden de corresponderende primaire vorkverlengingsduwplaat aan om de primaire vorkverlenging te bereiken. Wanneer het secundaire synchrone riemschijfmechanisme synchroon beweegt en de secundaire vorkverlengplaat in beweging brengt, rolt de U-vormige katrol in de U-vormige goot. Zorg ervoor dat de secundaire vorkverlengplaat de secundaire vorkverlenging realiseert. Het spanwielapparaat omvat: bout, stelbeugel, dubbele moer en spanwiel; Onder de synchrone riem I en aan weerszijden van het andere verloopstuk is een spanwiel aangebracht, dat via een dubbele moer aan de beugel van het hoofdlichaam is bevestigd; Een stelbeugel wordt door de bout onder de dubbele moer aangebracht en de positie van de stelbeugel wordt aangepast door de bout, zodat de stelbeugel de dubbele moer aandrijft om op en neer te bewegen, zodat de synchrone riem ik de stand kan behouden spanningstoestand onder invloed van het spanwiel.
Hoe zal de HEGERLS-shuttlebus de bedrijfsvoordelen vergroten?
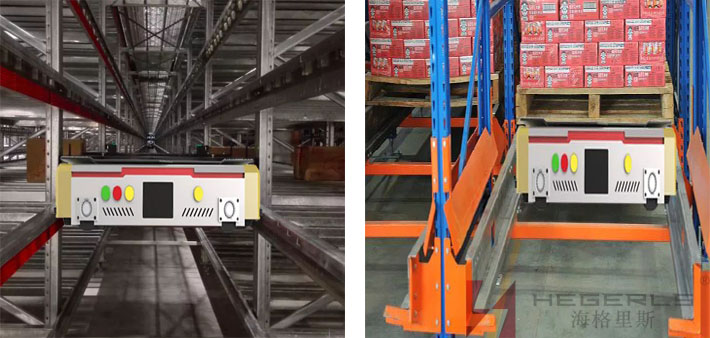
Ten eerste zijn het rijmechanisme, het vorkverlengingsmechanisme en het frame, de glijdende contactlijn en het krachtopvangapparaat van de HEGERLS intelligente shuttle-auto met clip-on-opslag redelijk gerangschikt, waardoor de ruimte van de shuttle-auto volledig wordt benut en kan worden aangepast aan de automatische opslag en ophalen van goederen met verschillende specificaties en locaties in het driedimensionale magazijn, waardoor de toepassingsdekking van de shuttle-auto wordt uitgebreid en snel en effectief een reeks continue acties van de shuttle-auto wordt voltooid, zoals lopen, vorkuitschuiven, picken Het opzetten en plaatsen van goederen. Het realiseert de snelle en nauwkeurige opslag van goederen, waardoor de operationele efficiëntie en het automatiseringstechnologieniveau van geautomatiseerd magazijn aanzienlijk worden verbeterd en de investeringskosten van ondernemingen worden verlaagd. Tegelijkertijd is het eenvoudig en licht van structuur, hoog in betrouwbaarheid en gemakkelijk te onderhouden. Het kan de traditionele rijbaanstapelaar vervangen, waarbij de flexibiliteit van het systeem wordt gerealiseerd en het voldoet aan de ontwikkelingstrend van e-commercelogistiek en magazijnautomatisering.
Ten tweede zijn in het rijmechanisme van de intelligente shuttle-auto van HEGERLS de verbindingsassen van aandrijfwielen en passieve wielen voorzien van groeven, en zijn de verbindingsdelen van lagers verbonden door een nieuw type elastische borgring, waardoor het axiale positioneringseffect van verbinding wordt gerealiseerd schachten; Door de elastische borgring te gebruiken om het axiale positioneringseffect te bereiken, kan de productie-efficiëntie worden verhoogd en kunnen de kosten worden bespaard.
Ten derde: de intelligente shuttlewagen van Higelis HEGERLS voor opslag realiseert zich dat het aandrijfwiel en het passieve wiel altijd op het rechte spoor bewegen zonder van het spoor af te wijken door de dubbele geleidewielstructuur. Deze positioneringsstructuur is stabieler en betrouwbaarder.
Ten vierde kan de secundaire vorkverlengingsstructuur van de HEGERLS intelligente shuttle-auto de vorkverlengingsafstand verder vergroten en meer manden op verschillende posities verkrijgen; Tegelijkertijd is het principe van het secundaire vorkverlengingsmechanisme eenvoudig en zijn de ontwerp- en fabricagekosten laag; Het transmissiedeel neemt de modus van een enkele motor + reductiemiddel + transmissie-as aan om het secundaire vorkverlengingsmechanisme het doel van synchrone uitzetting en inkrimping te laten bereiken, wat meer kosten bespaart, de vereiste lay-outruimte effectief vermindert en het gewicht van de shuttle-auto vermindert .
Ten vijfde gebruikt de intelligente shuttle-auto van Higelis HEGERLS een nieuw type spanwielapparaat, dat de synchrone riem snel op spanning kan houden en het normale werk van de shuttle-auto kan realiseren. Bovendien is dit spanwielapparaat eenvoudig te maken, gemakkelijk te installeren en snel aan te passen, wat kosten bespaart, ruimte bespaart en de werkefficiëntie verbetert.
Posttijd: 19 december 2022